步进电机定子相数:单相/两相/三相/四相/五相结构工作原理
当步进电机切换一次定子绕组的激磁电流时,转子就旋转一个固定角度即步距角。步距角一般由切换的相电流产生的旋转力矩得到,所以需要每相极数是偶数。步进电机通常都为两相以上的,当然也有一些特殊的只有一个线圈的单相步进电机。虽说单相,实为一个线圈产生的磁通方向交互反转而驱动转子转动。实用的步进电机的相数有单相、两相、三相、四相、五相。
现在使用的步进电机大部分用永磁转子。普遍使用永久磁铁的原因是效率高,分辨率高等优点。以下以介绍永磁转子为主。
决定步距角的因素
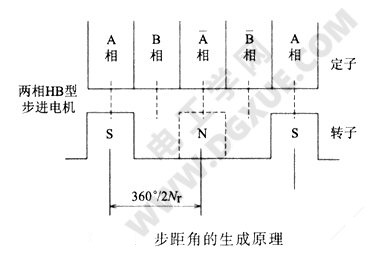
步进电机分辨率(一圈的步数,360°除以步距角)越高,位置精度越高。为了得到高分辨率,设计的极数要多。PM型转子为N与S极在转子的铁心外表面上交互等节距放置,转子极数为N极与S极数之和,为简化讲解,假设极对数为1。此处确定转子为永久磁铁的步进电机的步距角θs由下式表示,其中Nr为转子极对数,P为定子相数,(本课后面叙述的HB型步进电机Nr为转子齿数):
θs=180°/PNr
上式的物理含义如下:
转子旋转一周的机械角度为360。,如用极数2Nr去除,相当于一个极所占的机械角度即180°/Nr。这就是说,一个极的机械角度用定子相数去分割就得到步距角,此概念如下图所示。
由式θs=180°/PNr可知,步距角越小,分辨率越高,因此要提高步进电机的分辨率,就要增加转子极对数或采用定子相数P较多的多相式方法。而Nr的增加受到机械加工的限制,所以要制造高分辨率的步进电机需要两种方法并用才行。
单相步进电机
单相步进电机是在一个线圈骨架上缠绕环形线圈,给它通以正负交变的电流,每切换一次电流就按固定方向走一步。由于转子磁路所通过的磁导(磁阻的倒数,表示磁通流过的容易程度)变大为其转动方向,故单相步进电机只能按一个方向运动。为使转动方向确定,磁导采取了多种措施,例如使定子磁极宽于转子,定子与转子之间的工作气隙不均匀,转动方向为磁阻小的方向。下图为单相步进电机的转动原理。
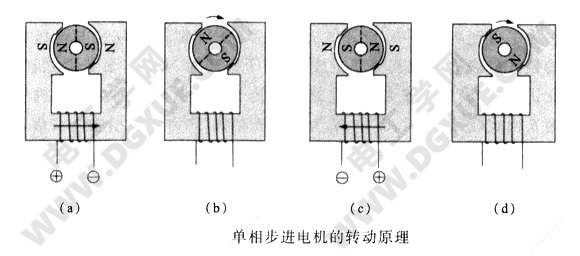
图(a)定子绕组通正电流,定子磁极产生N和S极,转子的N和S极被定子磁极吸引,停在图示位置。当定子电流由正变负时,在切换过程中,电流接近于零,定子对转子的吸引力接近零,此时转子磁通产生的转矩为主,如图(b)所示,转子的磁通要走气隙最小的路径,故转子在磁通力矩的作用下,沿箭头方向运动到转子磁极轴线(N和S极的中心线)正对气隙最小处停止。当定子绕组为负电流时,如图(c)所示,定子磁极的极性反转,转子磁极受到定子N和S极的斥力和引力作用,沿箭头方向运动,直到定转子磁极轴线重合时转子停止运动。加在绕组上的电流再次变换方向由负变正时,电流过零变正,则转子经过图(d)向图(a)移动,步距角为180°。上述动作反复进行,电机转子就能继续转动。
从以上单相步进电机的运行原理看出,单相步进电机的电磁转矩只在定子电流变换时产生,故其平均转矩比两相以上的电机要小得多,响应脉冲频率也在100pps以下,故其用途受到很大限制,只能在响应脉冲频率比较低的轻载下运行。例如时钟、车用计时器(发动机计时器)、水表计数器等。
下图为另一种单相步进电机结构的照片,最左边为电机整机,其次为电机线圈,再次为定子铁心,最后是永磁转子。

此种单相步进电机原理如上图中所示,气隙磁导发生变化,与只是磁导变化的结构不同,旋转方向依然是由不对称的定子磁极决定的。此定子为一个中间开直角三角形孔的磁极板,其斜线部分的磁导最大。转子磁极正对斜面时磁导最大,其为转子转动方向,其运行原理与上面的原理图是相同。
转子为圆柱形永磁磁极,极数为4极,将Nr=2,P=1带入式θs=180°/PNr,故步距角为θs=90°。
定子为一个圆形线圈,用正/负电流驱动。定子磁极通过气隙与转子产生相同的极数(4极)。其结构简单,一个有三角形孔的磁极,可近似看成4极。此电机用于水表的流量计等。
下图是另外一种单相步进电机的外观照片。此单相步进电机由照片看出,定子磁极的前端朝同一方向倾斜,从而改变转子磁路的磁导,使转子能沿一个方向旋转,其功能与上图(单相步进电机外观与结构)的定子相同。

此种单相步进电机转子为永磁磁极,其圆周上有N和S极共30个,定子为单相,总磁极数为30,用气隙作转子导向。绕于一个线圈架上的环形线圈经过正负电流,由式θs=180°/PNr得步距角θs=12°(Nr=15,P=1),并按一个方向运动。其响应速度因为单相绕组的关系,只有几十pps。此种电机实际用于建筑机械的时针等。
以上所述的单相步进电机的旋转方向由磁导的偏差大小决定。其他还有将定子磁极分极、嵌入铜质的短路线圈等,在本学习课程中就不再详述了。
两相步进电机
两相步进电机最简单的构成为Nr=1的情况,电机结构如下图所示。一般两相电机定子磁极数为4的倍数,至少是4。转子为N极与S 极各一个的两极转子。
定子一般用硅钢片叠压制作,定子磁极数为4极,相当于一相绕组占两个极,A相两个极在空间相差180°,B相两个极在空间也相差180°。电流在一相绕组内正负流动(此种驱动方式称为双极性驱动),A相与B相电流的相位相差90°,两相绕组中矩形波电流交替流过。
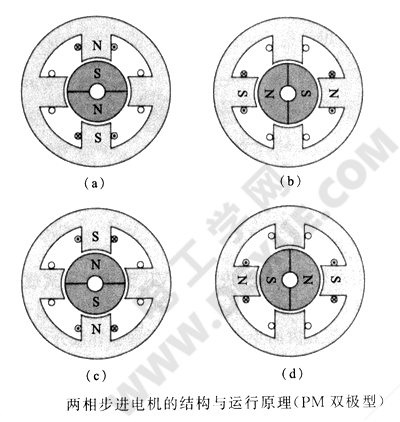
即两相电机的定子,在Nr=1时,空间相差90°,时间上电流相差90°相位差,电流与普通的同步电机相似,在定子上产生旋转磁场,转子被旋转磁场吸引,随旋转磁场同步旋转。
上图表示两相步进电机的结构(PM型)及其运行原理,从图(a)到图(b)顺时针旋转90°,依次图(c)、(d)均旋转90°,依次不断运转成为连续旋转。
以上图为例,假如A相有两个线圈,单向电流交替流过两个线圈,也可产生相反的磁通方向,此方式称为单极(uni-plar)型线圈。
如下图所示线圈内部只流过单方向电流,此线圈称为单极型线圈;另一种,线圈内流过正、反方向电流的线圈称为双极型线圈,两种线圈的优缺点将在后面的课程中详细介绍。单极型线圈可以取代上图所示双极型线圈,运行时具有相同的步距角。
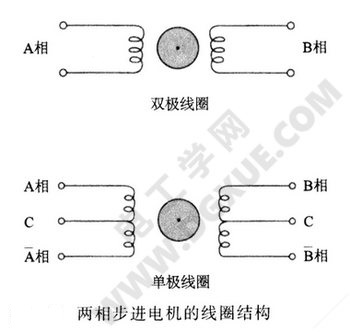
上图中的两相单极型线圈在有些文献中也被称为四相步进电机,此时其转子极对数、齿数Nr,以及步距角θs均与双极型线圈相同。本课程两相电机的定义符合式θs=180°/PNr,即将转子齿数和步距角θs代入式θs=180°/PNr,如P=2,则为两相电机,如Nr相同,P=4,步距角θs只有1/2,则电机为四相电机,在此特别提请注意。
两相步进电机现在应用广泛,实际电机的构造比图(PM双极型两相步进电机结构与运行原理)复杂,定子除采用叠片外,还有爪极结构,但基本原理可参考图(PM双极型两相步进电机结构与运行原理),图中所示的转子被称为PM型(永久磁铁或永磁式)转子,磁性圆柱的外表面形成转子磁极。
三相步进电机
转子不采用永久磁铁的步进电机(VR型或反应式或变磁阻式)很早就在三相步进电机上得到应用。1986年日本伺服公司开发了转子为永久磁铁、定子磁极带有齿的步进电机(在后面会详细介绍磁极齿的设计原理),定、转子齿距的配合,可以得到更高的角分辨率和转矩。三相步进电机定子线圈的主极数为三的倍数,故三相步进电机的定子主极数为3、6、9、12 等。
转子不采用永久磁铁的步进电机(VR型或反应式或变磁阻式)很早就在三相步进电机上得到应用。1986年日本伺服公司开发了转子为永久磁铁、定子磁极带有齿的步进电机(在后面会详细介绍磁极齿的设计原理),定、转子齿距的配合,可以得到更高的角分辨率和转矩。三相步进电机定子线圈的主极数为三的倍数,故三相步进电机的定子主极数为3、6、9、12 等。
下图为不同相数的步进电机典型定子结构和驱动电路的比较,其中忽略了转子结构图。假设转子均为PM型或HB型,并且依据定子为两相、三相、五相等配备相应的转子。定子采用不产生不平衡电磁力(在后面会详细介绍,转子径向吸引力的和不能完全互相抵消,产生剩余径向力)的最小主极数结构,即两相为4个主极、三相为3个主极、五相为5个主极时,结构上会产生不平衡电磁力,除特殊用途外不会使用上述结构。图中,定子的结构为两相为8个主极、三相为6个主极、五相为10个主极,为最简单的结构。
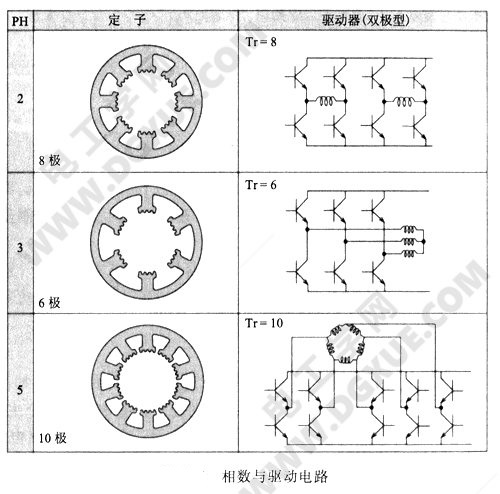
另一方面,如双极型(Bi-polar)线圈所使用的步进电机驱动电路,其功率管数,两相为8个、五相为10个,三相则由于绕组采用Y或△接法的关系,3个出线口的驱动只用6个功率管就够了,所以从电机和驱动器一体考虑,三相步进电机结构最简单,其两者的制造成本最低。
从定子相数的奇偶数来看,奇数情况下驱动电路中切换功率管的数量要比偶数情况下少,例如三相步进电机要比两相步进电机的驱动功率管数少。三相的驱动IC现在三权电气公司、三洋电机公司、新电元工业公司等生产企业已经有售。三相步进电机与两相步进电机比较,在相同的转子齿数时,具有提高1.5倍分辨率、振动低等优点,所以使用数量会增加,价格会降低,希望其能成为一款系列化步进电机,其性能将在后面详细介绍。
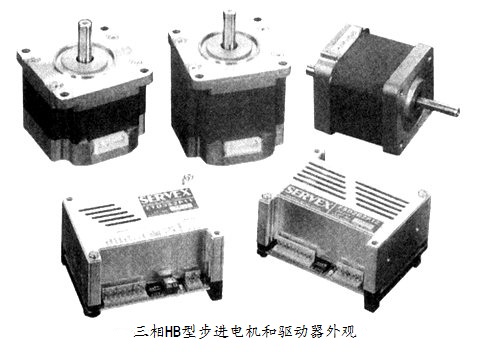
有关三相永磁式步进电机,除本课程外,以前还没有系统介绍的文献, 本课程将详细介绍三相HB型步进电机(42mm及60mm),其驱动器的外形如下图所示。
四相步进电机
例如Nr=50,θs=0.9°的步进电机,按式θs=180°/PNr计算,则P=4,即为四相步进电机。这里需要注意的是上文两相步进电机中图所述的的两相单极线圈虽然有四个线圈,但不是四相电机。
四相步进电机因其为偶数相,驱动电路的功率管要用16个,定子的主极个数也为16个,均为两相步进电机的两倍,所以造成其驱动器结构复杂,成本高,因此只有特殊用途才使用。
五相步进电机
现在市面上销售的步进电机中,相数最多的电机为五相。如图(相熟与驱动电路)所示,定子主极数为10个,同一相绕组分别绕在相差180°的2个主极上,同时通电产生磁场。各相绕组之间首尾相连,从五个接点引出电源线。 通常为5个绕组同时通电,形成一条支路是1个绕组,另一条支路为4个绕组串联的并联通电模式;顺次切换1个绕组通电支路的相,就能使转子一步步旋转。所得步距角如下所述。
依据式θs=180°/PNr,Nr=50时,对两相、三相、四相、五相电机而言,P=2、P=3、P=4、P=5代入式中,得到步距角为:两相为1.8°,三相为1.2°,四相为0.9°,五相为0.72°。五相步进电机的分辨率是最高的,而且定位转矩小。定子结构及其驱动电路比四相步进电机要简单,但比两相和三相步进电机要复杂,成本也高。
相数与特性
现以两相与三相步进电机为例详细说明步进电机的相数与特性的关系。相数与特性综合概述为:
高分辨率
根据式θs=180°/PNr,步距角为180/PNr,故相数P越大,角分辨率越高。提高分辨率,可以提高定位控制精度,改善低速失步,使多相控制成为可能,并且可以改善阻尼(改善制动性能,减小停止时的超调量和制动时间)。详细说明在驱动技术部分。
低振动
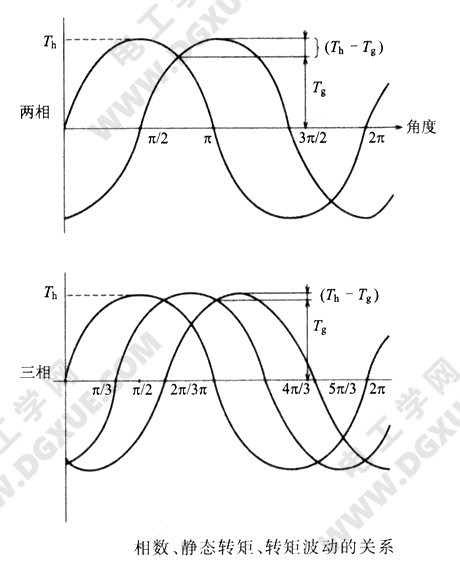
如下图,表示的是两相和三相步进电机的转矩波动,相数愈多,换相的两相绕组动态转矩曲线的交点转矩值Tg与最大静态转矩Th的相对误差愈小。Tg为电机所带负载转矩的下限值,(Th— Tg)/Th为转矩波动的相对误差,相数越多,此值越小,对降低振动越有利。亦即,相数越多,电机产生的转矩波动幅值越小,频率越高,产生的振动越小(有关说明在后面章节)。
高转速
多相步进电机的优点是能高速响应。步进电机为同步电机,绕组电流频率与转子速度成正比例,若电机高速运转,则绕组电流角频率ω增加,使绕组电感L产生的电抗ωL加大,从而降低电流,致使转矩下降。
当用数千pps驱动步进电机时,电机绕组阻抗Z与直流电阻相比,电抗ωL将大幅增加。当电机高速运转时,如电压V一定,则电机相电流为V/ωL。机械角速度ωm为ω=Nrωm,则对相同机械角速度的电机,电流与Nr成反比。
根据式θs=180°/PNr,两相Nr=50时,步距角为1.8°;五相Nr=20时,步距角为1.8°。当这两种步进电机以相同的转速高速旋转时,五相绕组的电流是两相的2.5倍,因为电流小则转矩小,所以五相的转矩比两相的要大。
看了本文的人还看了
- 视频:直流电机的基本工作原理
- 视频:直流电动机的构造
- 视频:单相异步电动机
- 视频:同步电动机
- 视频:三相异步电动机的铭牌数据
- 视频:三相异步电动机的转动原理
- 视频:三相异步电动机的构造
- 应用于自动机械、医疗器械及游戏机中的步进电机
- 旋转、摆动照明灯具中使用的步进电机
- 监控摄像机中使用的步进电机
- FDD(软盘驱动器)中使用的步进电机
- 打字机中使用的步进电机
- 传真机中的步进电机
- 复印机中的步进电机
- 步进电机位置定位精度的解决方法
- 步进电机改善暂态特性的解决方法
- 降低步进电机振动、噪音的解决方法
- 步进电机增加动态转矩的解决方法
- 选择步进电机的计算方法(附例题)
- 电机选择:根据使用环境来选用步进电机
- 电机选择:从转速变化率来选用步进电机
- 电机选择:从转速来选用步进电机
- 电机选择:步进电机位置定位精度的选用
- 根据步进电机种类、优缺点来选择电机
- 步进电机噪音、振动、速度变化的测量方法
- 步进电机暂态(阻尼)特性的测量
- 步进电机步距角度精度的测量
- 步进电机动态特性的三种测量方法
- 步进电机的静态转矩特性及测量方法
- 三相步进电机的驱动电路
 鄂网公安备 42112502000017号
鄂网公安备 42112502000017号